产品规格书 - RA8-P26

RA8-P26
1. 产品特点
- 支持标准 PWM 控制信号,广泛兼容各类单片机、舵机控制器与机器人开发平台
- 内置高精度 电位器位置反馈,实现平滑、稳定的闭环角度控制
- 提供 180° / 270° 多种物理转角规格可选,适配差异化机构行程需求
- 支持 6.0V ~ 8.4V 宽幅电压输入,契合 2S 锂电池及常规稳压供电架构
- 采用业界标准 25T 输出齿,兼容通用舵盘、金属舵臂及结构配件
- 采用加厚全金属齿轮组,具备良好的耐磨损与抗冲击能力
- 采用铝合金 CNC 中壳散热设计,提升高负载下的散热效率
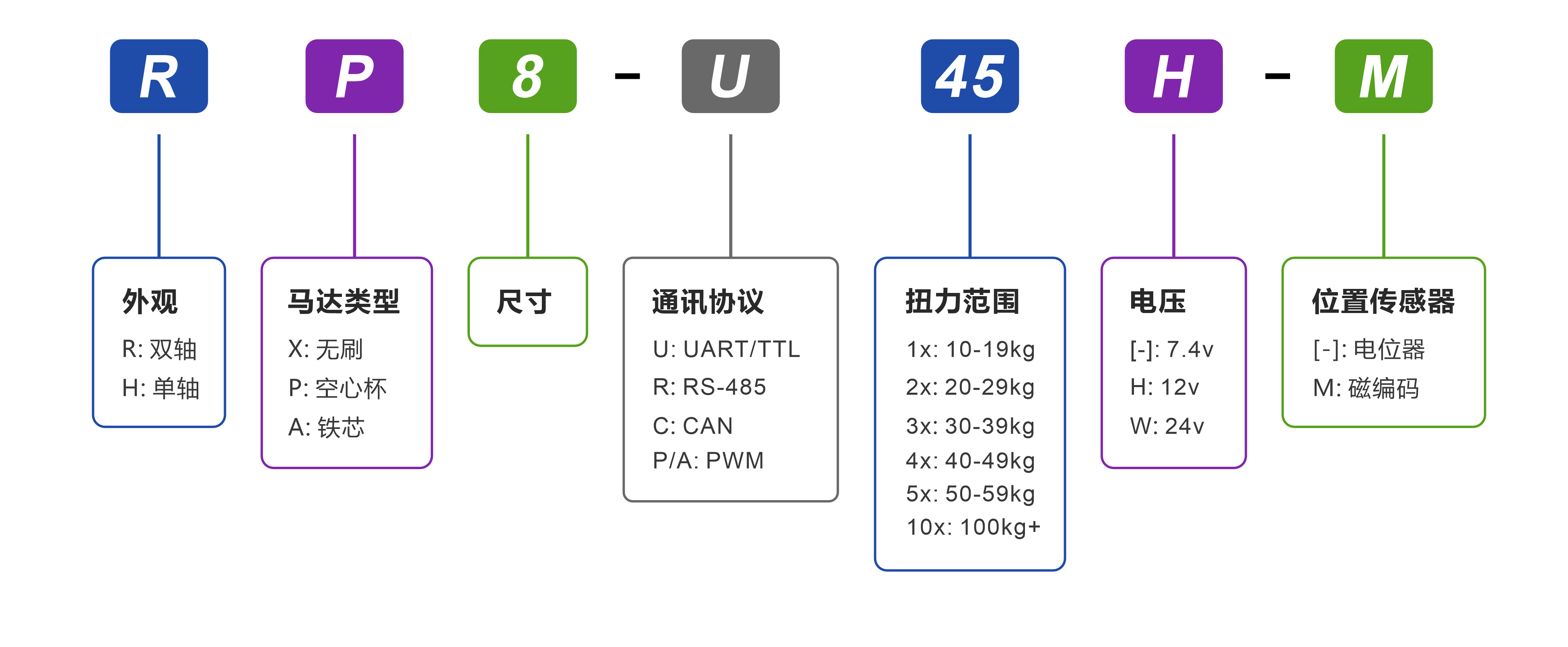
2. 型号定义
3. 规格参数
3.1 基础参数
| 参数项 | 参数值 |
|---|---|
| 工作电压 | 6.0 ~ 8.4 V |
| 马达类型 | 铁芯 |
| 位置传感器 | 电位器 |
| 有效角度 | 270° (@500→2500μsec) |
| 旋转方向 | 逆时针(500→2500μsec) |
| 控制信号 | PWM |
| PWM 周期范围 | 3 ~ 20 ms |
| 死区 | 2 μs |
| 齿比 | 273:1 |
| 输出齿规格 | 铜 / 25T |
| 输出齿支撑 | 双轴承 |
| 接口类型 | PH2.0 x 2 |
| 外壳材料 | 铝合金中段 / 上下壳工程塑胶 |
| 尺寸 | 40 x 40 x 20 mm |
| 重量 | 60 g |
3.2 特性参数
| 参数项 | 参数值 |
|---|---|
| 堵转扭矩 | @8.4V: 30 kg-cm @7.4V: 25 kg-cm @6.0V: 20 kg-cm |
| 空载速度 | @8.4V: 0.139 sec / 60° @7.4V: 0.150 sec / 60° @6.0V: 0.171 sec / 60° |
| 堵转电流 | 3 A |
| 空载电流 | 300 mA |
| 待机电流 | 50 mA |
4. 外观尺寸与安装
文件下载: PDF ~ STEP ~ DWG~ 更多配件图纸


5. 接口与连线

引脚定义